
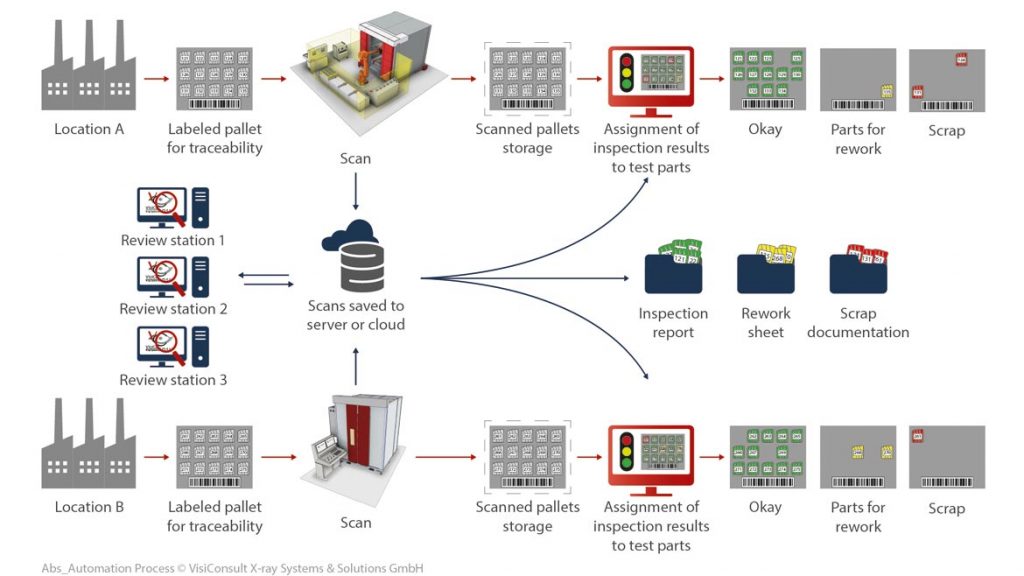
Помимо автоматизации системы компьютерной томографии для NDE 4.0 очень важно оцифровать весь процесс неразрушающего контроля (оценки).
Компьютерная томография (КТ) стала стандартным методом в неразрушающем контроле (НК, NDT) или в более количественном подходе – неразрушающей оценке (НО, NDE), когда речь идет об осмотре внутренних структур или измерении деталей, особенно количественном. В настоящее время КТ претерпевает изменения в направлении недавно созданного NDE 4.0.
NDE 4.0 является производной от Industry 4.0 – будущего проекта в рамках высокотехнологичной стратегии правительства Германии по реализации идей четвертой промышленной революции. После автоматизации производственных процессов в промышленности четвертая промышленная революция затрагивает вопросы цифрового соединения и связи между производством, а также системы обеспечения качества, т.е. системы НК или НО. Такие термины, как «умная фабрика» или «цифровой двойник» связаны с этой происходящей трансформацией.
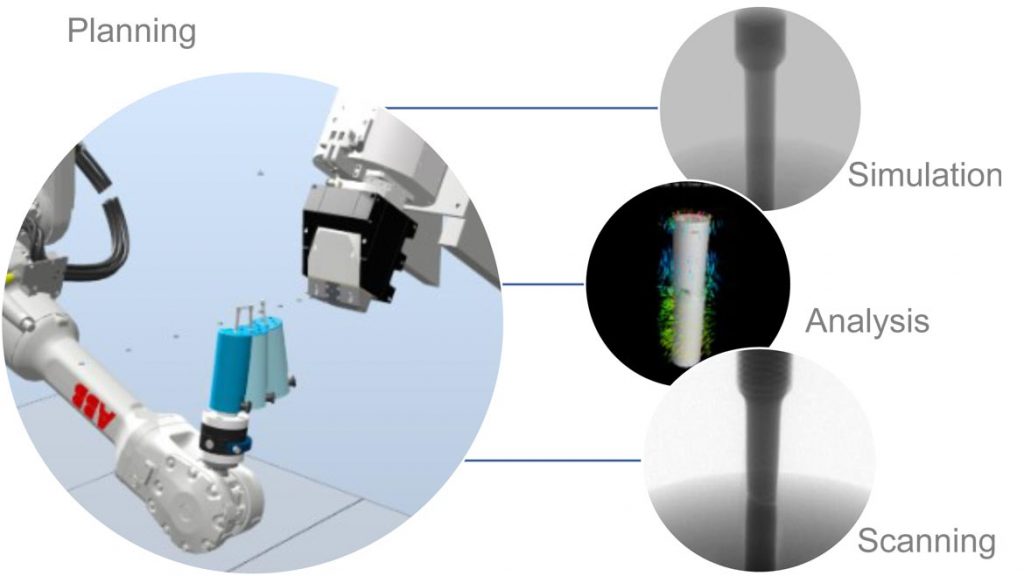
Помимо автоматизации системы КТ для NDE 4.0 очень важно оцифровать весь процесс НО. На основе спецификации испытаний и соответствующих руководящих принципов и стандартов для компонента, подлежащего проверке, они должны автоматически передаваться в систему КТ и интерпретироваться ею. Все манипуляции с компонентом в процессе проверки должны выполняться без участия человека. Наконец, результат оценки должен быть представлен в цифровом формате, пригодном для чтения и интерпретации. Эта цифровая информация может быть использована для синхронизации цифрового двойника компонента с его текущим состоянием. Конечно, система КТ может также иметь цифровой двойник, который позволяет системе виртуально планировать выполнение задачи измерения и, при необходимости, даже прогнозировать ожидаемые результаты, например, для различных сценариев воздействия на компонент.
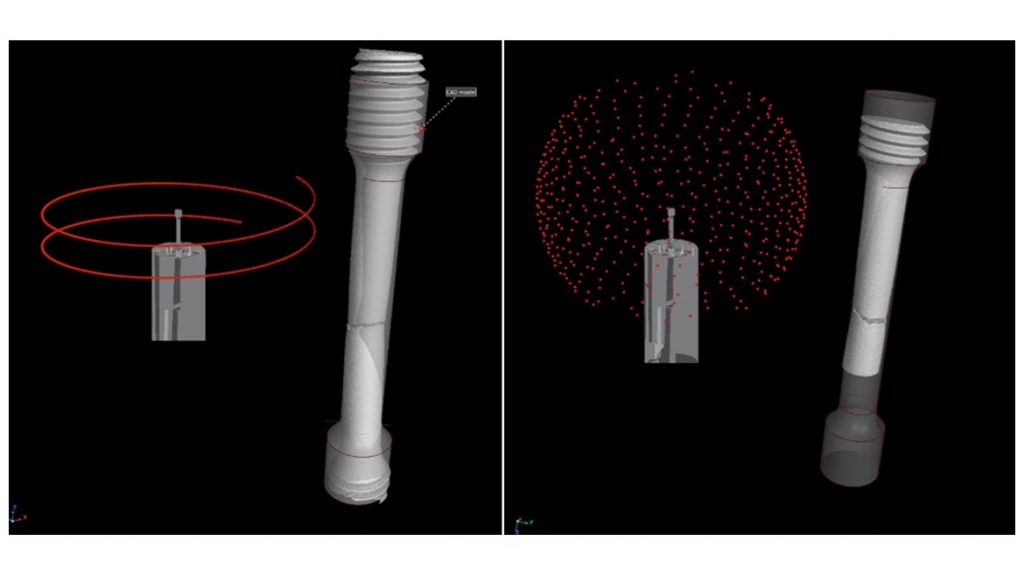
Роботизированная КТ хорошо подходит для NDE 4.0. Благодаря высокой степени свободы при использовании робота в качестве манипулятора системы КТ можно выполнять КТ-сканирование даже небольшой части компонента, так называемое сканирование области интереса (ROI CT). Это полезно для адаптации на лету траектории сканирования к неизвестному компоненту с его техническими характеристиками. Кроме того, вместо классического вращательного сканирования с перемещением компонента вокруг оси вращения робот может выполнять более сложные траектории, например, спиральную или даже сферическую. Последняя требует меньшего количества проекций, чем другие упомянутые траектории, поскольку проекции для томографии содержат больше новой информации о компоненте, когда проекции сделаны на равных расстояниях на сфере вокруг компонента.
Для цифрового двойника роботизированной компьютерной томографии не требуется никакого другого оборудования, кроме стандартной рабочей станции. Это означает, что состояния источника рентгеновского излучения, робота как манипулятора, компонента и цифровой детекторной матрицы (DDA) моделируются программным обеспечением. С другой стороны, программное обеспечение для управления и анализа, т.е. графический интерфейс пользователя (GUI), используемое в реальной системе, остается неизменным. Таким образом, оператор не увидит никакой разницы при взаимодействии с реальной системой или с цифровым двойником. Для моделирования цепи рентгеновской визуализации можно использовать инструмент моделирования, который позволяет удаленно создавать реалистичные изображения с помощью программного обеспечения.
Для управления роботом может быть реализован общий графический интерфейс управления, использующий только декартову систему координат для настройки трех ортогональных направлений трансляции и определения шага, вращения и отклонения от курса объекта. Этот интерфейс независим от текущего манипулятора, т.е. пользователю не нужно заботиться о реальной конфигурации общих значений кинематики. Таким образом, тот же самый графический интерфейс пользователя (GUI) может быть использован и для классических манипуляторов и включает специальный манипуляционный блок из идеальных мировых координат. Это позволяет даже не специалистам по робототехнике управлять роботизированной системой КТ. С NDE 4.0 настройка траектории сканирования без участия человека очень проста, поскольку тестовые области могут быть заданы только в декартовых координатах, независимо от базовой тестовой системы с ее неизвестным количеством осей.
До сих пор обсуждались только статические КТ-сканы. Однако, поскольку последовательности отдельных изображений образуют фильм, последовательность отдельных реконструированных объемов КТ также приводит к фильму в трех измерениях, который называется 4D КТ. Небольшое количество проекций, необходимых для роботизированной КТ, также делает ее хорошо приспособленной для быстрого получения изображений, что является основой для 4D КТ.
В контексте NDE 4.0 и создания «умной фабрики» идея производства компонентов с использованием методов аддитивного производства (AM) является очевидной.
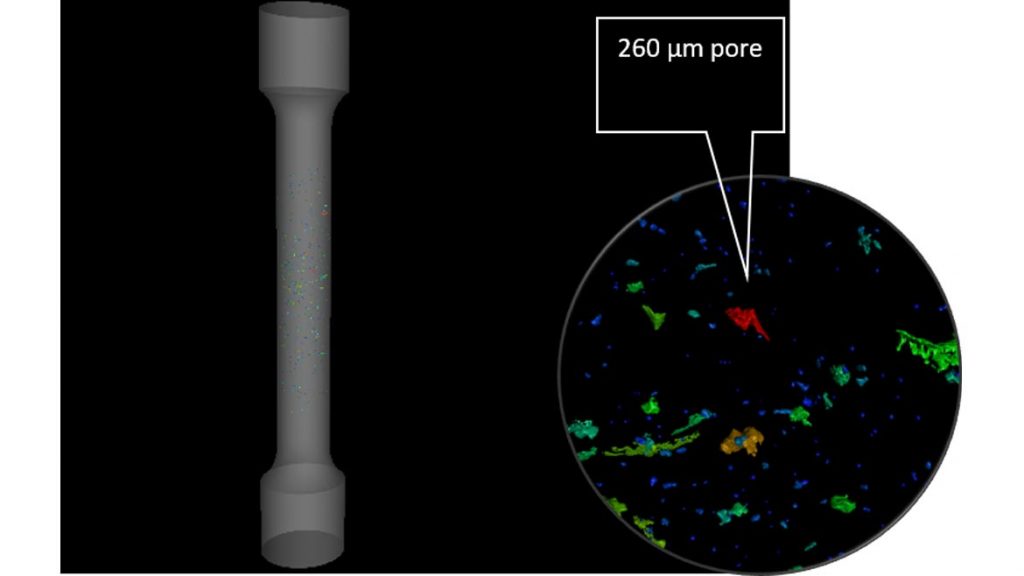
Помимо известных типов дефектов, таких как поры, трещины и включения, АМ часто приводит к типичным нарушениям, таким как расслоение и поры отсутствия сплавления. Непроплавленные поры возникают, когда рыхлый порошок не расплавляется в процессе 3D-печати. Это может произойти, если мощность лазера 3D-принтера по какой-то причине была локально слишком низкой, например, если лазерный диод вышел из строя или в слое порошка присутствуют капли материала.
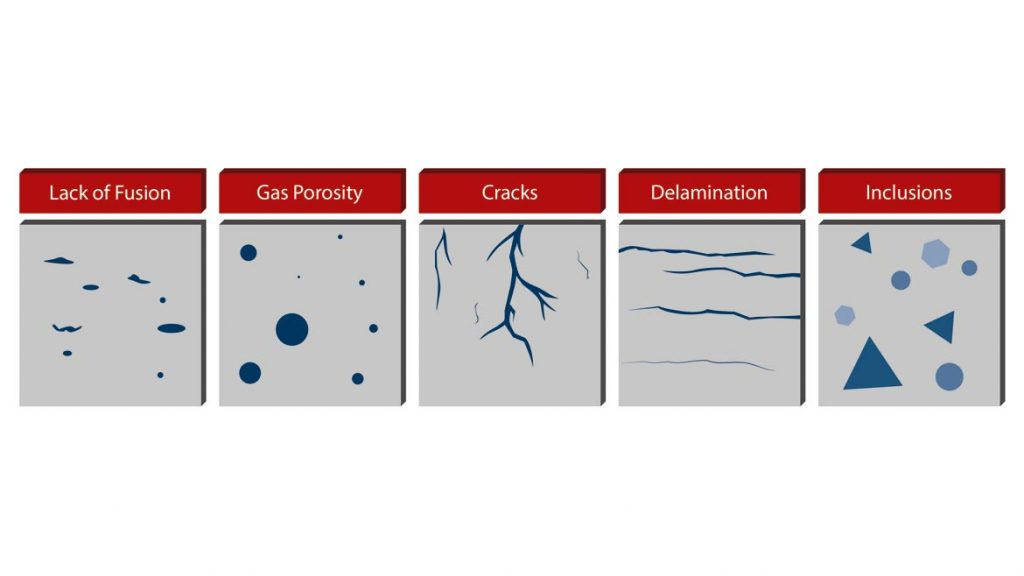
Как правило, газовые поры и включения легко обнаруживаются, в то время как трещины и расслоения обнаруживаются только при проникновении в них в том же направлении их распространения. Поры отсутствия сплавления похожи на плоские или овальные газовые поры, поэтому их также можно увидеть в направлении длинной оси лучше, чем другие, но из-за того, что они заполнены сыпучим порошком, их контрастность очень низкая и будет тем ниже, чем меньше они будут. С помощью роботизированной компьютерной томографии траектория сканирования может быть легко адаптирована к направлению распространения.
Таким образом, роботизированная компьютерная томография готова к NDE 4.0.
Frank Herold
Статья из журнала «Quality Magazine», 8 августа 2022 г.
Перевод подготовила Елена Михаленко